시작하며..
지난 글에서 논의된 내용들을 정리해 보겠습니다. 다시 한번 remind하면, Optimal인 판별기를 가정한 경우의, GAN의 손실함수는
입니다. 개념적으로는 GAN이 생성된 데이터와 원래 데이터 간의 JS 거리를 가장 작게 하는 방향으로 학습이 되고 있다고 할 수 있겠습니다.
하지만, JS 거리가 언제나 잘 정의가 되는 것은 아니었죠. Support를 공유(absolute continuity 가정)해야만 가능한 것으로, manifold hypothesis에 의하면, support를 공유하지 않을 활률이 아주 높다는 것입니다. 그렇다면 좀더 안정적으로 정의되는 분포간의 거리를 재는 measure가 필요한데요, W-거리가 그러한 성질을 만족합니다. W-거리는 비교하는 두 분포 간의 absolute continuity를 요구하지 않는 거리입니다. 대신, 대상이 되는 분포의 absolutely continuity만 요구합니다. 기존의 조건보다 많이 완화된 조건입니다. 거기다, KL/JS divergence가 0으로 수렴하지 않더라도, W-거리는 0으로 수렴할 수 있고, W 거리가 수렴하면, KL/JS divergence는 수렴을 해야만 합니다. 그러니, W를 0으로 만드는 작업이 KL/JS divergence를 0으로 만드는 작업보다 훨씬 쉬울 것 같습니다. 훨씬 안정적으로 정의될 수 있다는 것을 의미합니다.
그래서 W-거리를 구했지만, 이 metric은 원래의 정의에 따르면 거리를 구하는 것만으로도 벅차다는 또다른 난관에 봉착했죠. 이번 글에서는 어떻게 이 문제를 풀어내는지를 살펴 보겠습니다.
Kantorvich - Rubinstein Duality
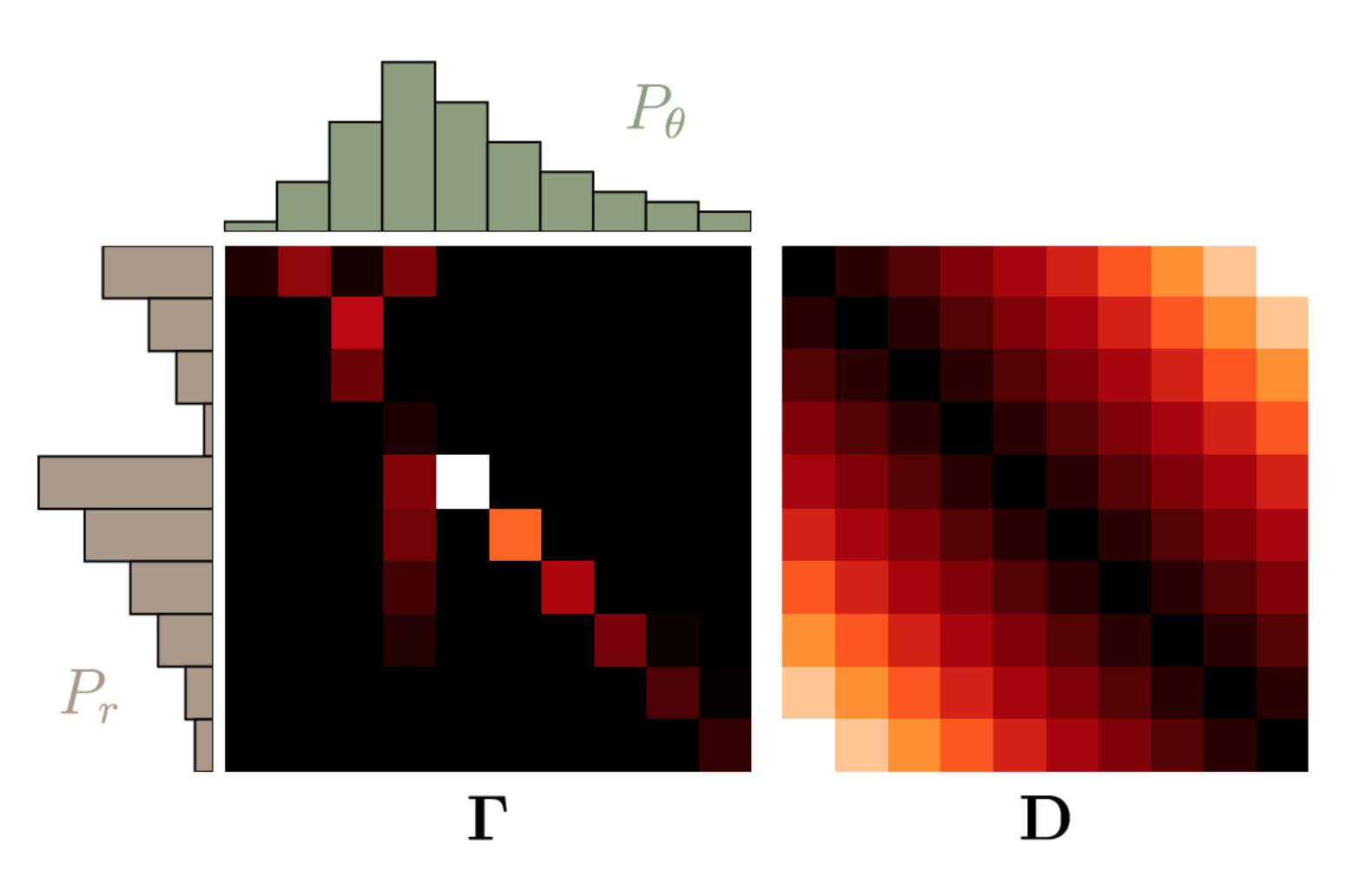
$P_\theta$와 $P_r$을 Discrete한 분포라고 가정하면, $\gamma(x,y)$를 다음과 같은 matrix로 나타낼 수 있습니다.
그리고 support의 원소의 거리를 나타내는 matrix, $D$를 다음과 같이 정의하면,
위의 두 행렬의 Fabuluous norm으로 기대값을 구할 수 있습니다.
$vec$ operator는 행렬을 벡터로 표현하는 operator입니다. 위의 행렬은 길이가 $l^2$인 벡터들로 바뀝니다.
다음의 cost,
를 최소화하고 싶은 목적함수로 하되, 이 최적화 과정에는 다음과 같은 constraint들이 있습니다.
- $d$의 모든 원소는 0보다 크다
- $\sum_{i=1}^l \gamma(x_i, y) = P_r(y)$
- $\sum_{j=1}^l \gamma(x, y_j) = P_\theta(x)$
위의 조건을 표현하기 위해 적절히 design 행렬 $A$를 정의하면,
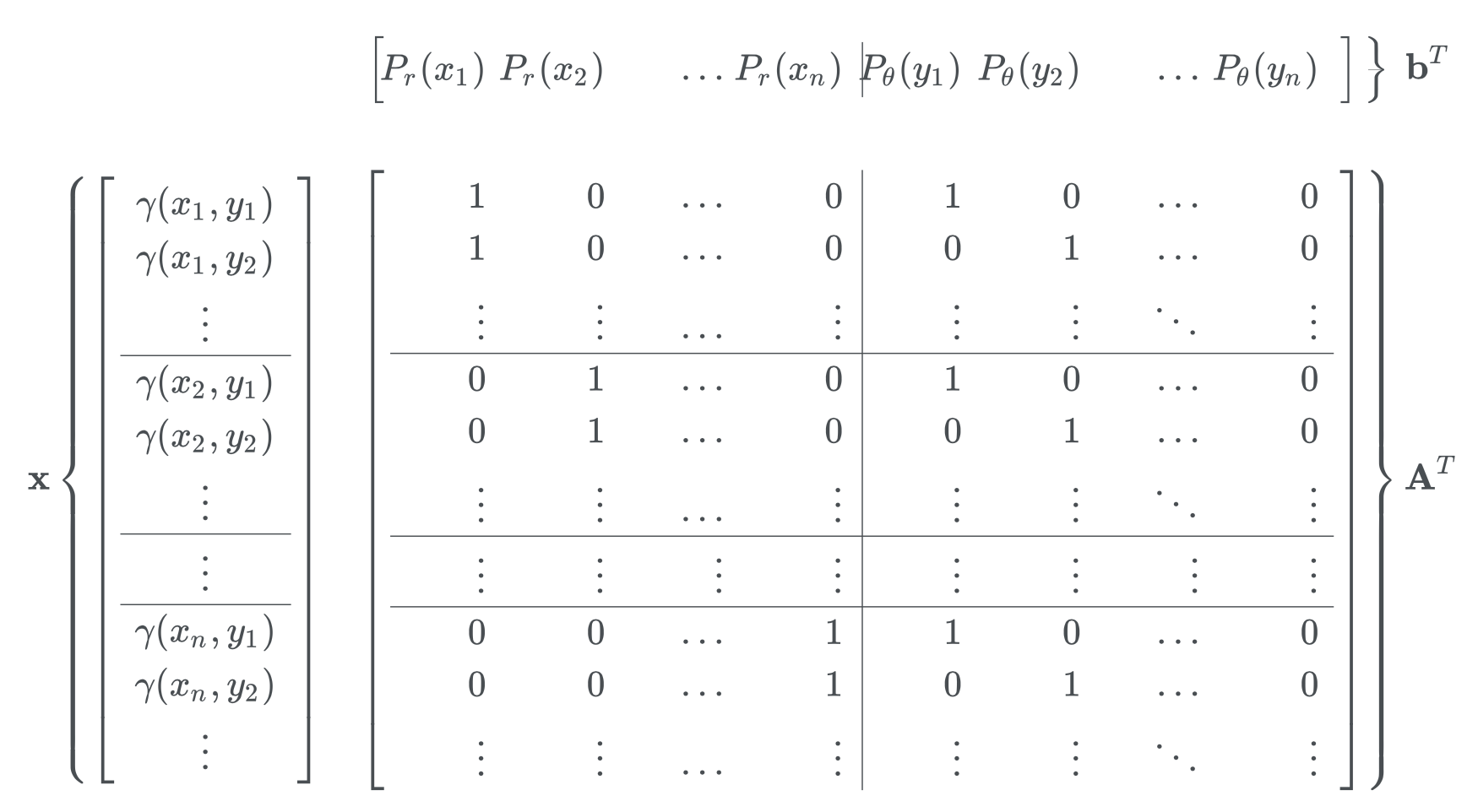
위의 조건 중 두번째 세번째 조건은 다음과 같이 쓸 수 있습니다.
요약하면, EM distance를 구하는 것은 다음의 linear programming 문제를 푸는 것과 같습니다.
s.t. $g \ge 0$ and $Ax = b$
NOTE: 다음은 python으로 moving cost를 최소화한 transportation plan을 찾는 방법을 simulation 해놓은 예제입니다.
import numpy as np
from scipy.optimize import linprog
p_r = (.1, .2, .1, .2, .1, .2, .1)
p_t = (.1, .1, .1, .1, .1, .1, .4)
l = 7
A_r = np.zeros((l,l,l))
A_t = np.zeros((l,l,l))
for i in range(l):
for j in range(l):
A_r[i,i,j] = 1
A_t[i,j,i] = 1
D = np.zeros((l, l))
for i in range(l):
for j in range(l):
D[i, j] = np.abs(i-j)
A = np.concatenate((A_r.reshape((l, l**2)), A_t.reshape((l, l**2))), axis = 0)
b = np.concatenate((p_r, p_t), axis = 0)
c = D.reshape((l**2))
opt_res = linprog(c, A_eq = A, b_eq = b)
emd = opt_res.fun
gamma = opt_res.x.reshape((l, l))
위에서 $\gamma(x,y)$는 최적의 transportation이고 다음은 해당 transportation plan의 결과물입니다.
array([[0.1, 0. , 0. , 0. , 0. , 0. , 0. ],
[0. , 0.1, 0.1, 0. , 0. , 0. , 0. ],
[0. , 0. , 0. , 0. , 0. , 0. , 0.1],
[0. , 0. , 0. , 0.1, 0. , 0.1, 0. ],
[0. , 0. , 0. , 0. , 0.1, 0. , 0. ],
[0. , 0. , 0. , 0. , 0. , 0. , 0.2],
[0. , 0. , 0. , 0. , 0. , 0. , 0.1]])
위의 배열을 가로 세로로 모두 합해 보면, 두 분포를 marginal 분포로 가지는 결합확률분포이을 쉽게 알 수 있습니다.
큰 문제에 대해서는 위와 같이 바로 transportation plan을 찾기가 어렵습니다. 이를 위해 dual problem을 정의합니다. 모든 최적화 문제는 dual problem이 존재합니다. (문제에 따라 강쌍대성과 약쌍대성을 만족합니다.) 위 문제의 dual 문제는 다음과 같이 쓸 수 있습니다.
s.t. $A^Ty \le d$
원래 도출했던 최적화 문제를 primary form이라 하고, 바로 위에 정의된 문제는 dual form이라고 합니다.
Kantorvich의 formulation은 linear programming의 정준(canonical) 형태로 나타낼 수 있고, 이는 강쌍대성(strong duality)이 성립합니다. 강쌍대성을 가지는 문제는 primary/dual 문제로부터 얻은 solution이 일치한다는 것을 의미하고 우리는 두개의 문제 중에 보다 해를 찾아내기 쉬운 문제를 풀면 됩니다. 이 문제에서는 목적식에 $P_r$과 $P_\theta$가 나타나므로, dual form이 더욱 직관적입니다.
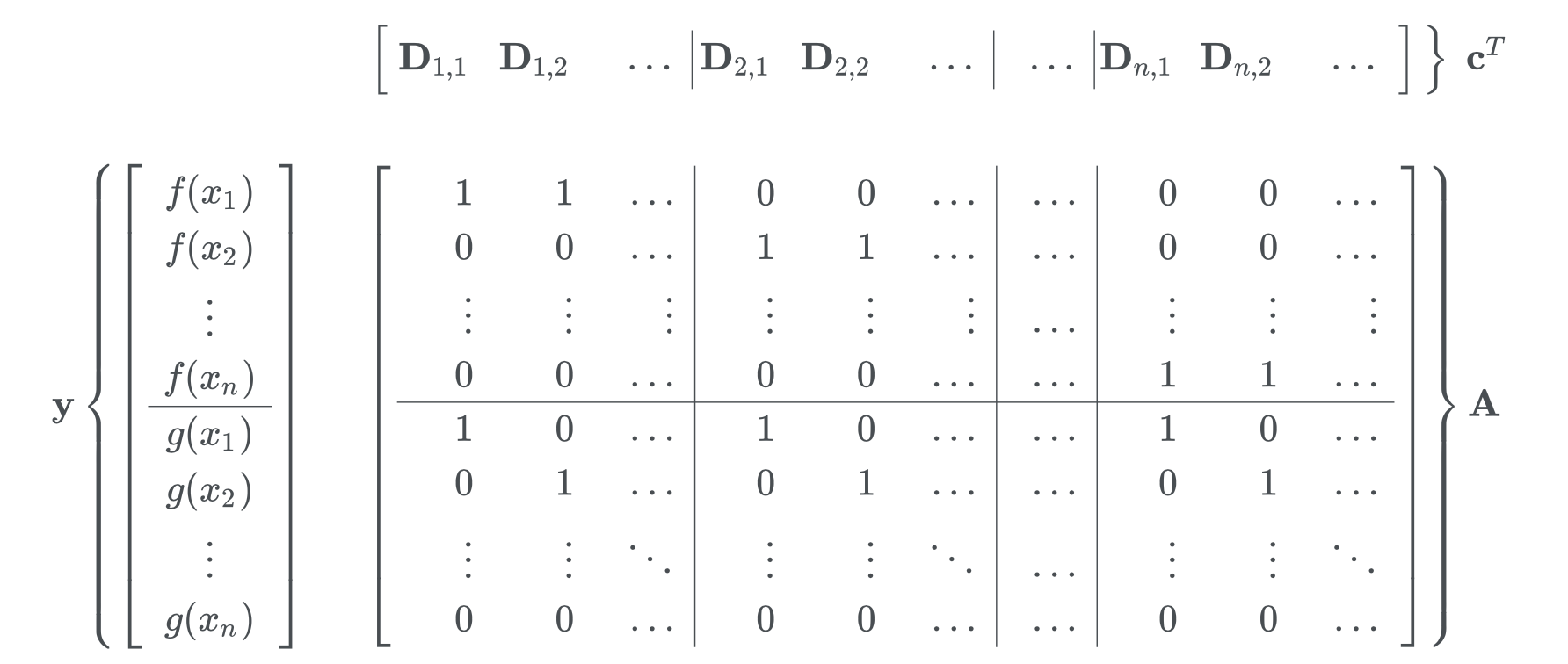
dual form에서 목적함수의 최대값, $\tilde c = b^T y^* $를 다음과 같이 표현할 수 있습니다. $\boldsymbol f$와 $\boldsymbol g$는 각각 $\mathbb R^l$에 속해 있습니다. 목적함수를 다음과 같이 표현할 수 있습니다.
제약식 $A^Ty$으로부터 다음의 관계를 얻을 수 있습니다.
$D_{i,i}$는 모든 $i$에 대해서 0입니다. 자기 자신과의 거리는 0이기 때문입니다.
$P_\theta$와 $P_r$이 모두 양의 값을 가지므로 (확률의 공리입니다.) EMD를 극대화하기 위해서는 $\boldsymbol f^T P_\theta + \boldsymbol g^T P_r$이 극대화되는 점이 곧 EMD가 극대화되는 점이고, $f(x_i) \le -g(x_i)$이므로, $f(x_i) = - g(x_i)$인 점에서 극대화 되고, 결국 $\boldsymbol f^T P_\theta + \boldsymbol g^T P_r$은 0인 경우 EMD가 가장 극대화됩니다. (여기서 EMD를 극대화시킨다는 것은 dual 공간에서 작업하기 때문입니다.)
이 조건을 활용하면, 제약식을 다음과 같이 쓸 수 있게 됩니다.
다시 말하면, 위의 조건을 만족하는 함수족에 대해서 EMD를 극대화하면 된다는 것을 의미합니다. 거기다 EMD 또한 다음과 같이 쓸 수 있습니다.
요약하면, EMD를 구함에 있어서, 모든 가능한 joint distribution의 모임에서 cost를 가장 작게 하는 joint distribution을 골라서, 그 joint distribution에 대해 기대값을 구해야 하는 작업을, Lipschitz 조건을 만족하는 함수족 중 $E_{P_\theta} (f) - E_{P_r}(f)$를 가장 크게 하는 함수를 찾고 그 함수에 대한 기대값을 구하는 문제로 전환한 것입니다.
지금까지 설명해 놓은 Kantorovich-Rubinstein duality에 의한 W-거리는 다음과 같이 정의됩니다.
이렇게 정의함으로써 우리는 모든 transportation에 대한 $\inf$를 구하지 않아도 됩니다. Lipschitz continuous 함수 중에서 가장 주어진 분포 하에서 기대값을 가장 크게 하는 값이 W-거리가 됩니다. $K$- Lipschitz continuous 함수는
과 같이 정의된 함수로서 함수가 정의된 모든 점에서 함수의 기울기가 $K$보다 작은 함수를 의미합니다. 참고로 이 함수족은 continuous 할 필요는 없습니다.
다음이 성립합니다.
만약 $K$ - Lipschitz 함수족으로 거리를 정의한다면, 이는 W-거리의 $K$배로 정의가 됩니다.
이제 WGAN에 어떻게 위의 거리가 적용되는지를 살펴보겠습니다.
WGAN의 학습 알고리즘
여전히 Lipschitz 조건을 만족하는 함수의 모임은 너무나 큽니다. 그렇기 때문에 모든 Lipschitz 조건을 만족하는 함수보다는 특정 parameter, $w$로 표현할 수 있는 함수만을 고려합니다. 그리고 이 함수가 $| f_w| \le 1$을 만족한다고 하죠. 만약 parameter의 공간을 $\mathcal W$라고 하면 다음의 관계를 생각할 수 있습니다.
만약 운이 좋게도 $f_w$가 Lipschitz 함수족 중에 (a)를 극대화하는 경우라면 정확하게 W-거리를 찾을 수 있겠지만, 그 자체는 거의 불가능하다고 생각이 됩니다. 하지만 computing cost를 고려한 현실적인 대안으로 여긴다면, 적절한 근사값이 될 수도 있을 것 같습니다.
만약 $f_w$가 W-거리를 적당하게 잘 measure했다면, 이를 바탕으로 Loss의 gradient를 구할 수 있을텐데, 다음과 같이 $\theta$에 대해 편미분을 하면 첫번째 항은 $\theta$와 상관이 없으므로 사라지고, 두번째 항만 남습니다.
위의 식에 근거해서 모수 $\theta$를 학습하게 되는거죠.
기존의 GAN에서는 discrimator가 있어서, fake와 real의 분포를 보고 생성된 데이터가 real인지 fake인지 판단을 합니다. 하지만, WGAN에서는 그렇게 이분법적으로 판단하는 것이 아니라, 얼마나 실제와 유사한지를 W-거리를 재어 그 거리를 줄여주는 방향으로 generator를 업데이트 합니다.
| GAN | WGAN | |
|---|---|---|
| Discriminator | JS divergence를 통해 판별기를 학습 | $\cdot$ |
| Critique | $\cdot$ | Wassersten 거리를 구하기 위한 Lipschtz 함수를 근사 |
| Generator | 판별 결과를 1에 가깝도록 학습 | 데이터 분포와의 W 거리를 줄이는 방향으로 학습 |
요약하면, 다음과 같은 순서를 따릅니다.
-
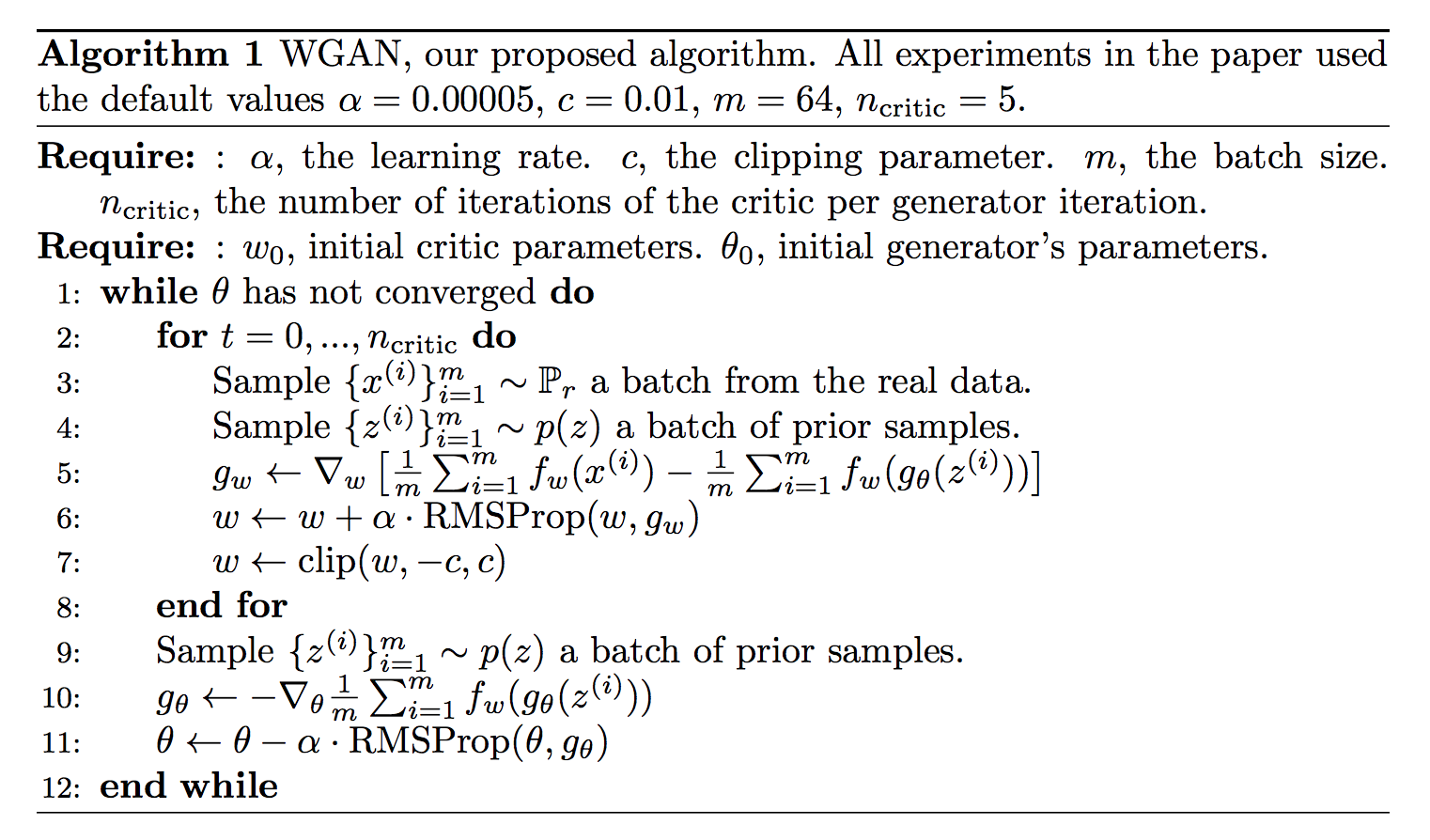
$\theta$가 고정된 상태에서 $W(P_r, P_\theta)$를 구합니다. 거리를 가장 잘 구하기 위해서는 $E_{X\sim P_r}(f_w(X)) - E_{X \sim P_\theta}(f_w(X))$의 supremum을 구해야 하므로, 목적함수를 증가시키는 방향으로 $f_w$의 모수인 $w$를 학습시킵니다. 정확한 거리를 재기 위한 단계입니다.
-
$f_w$가 어느정도 수렴한 후에는, 다시 말하면, 나름 정확한 W 거리를 찾고 나면, 이 함수를 이용해서 목적함수의 gradient인 $- E_{P_\theta}(\nabla f_w(x))$를 추정합니다. 이때에는 거리를 최소화 해야 하므로, 목적함수를 줄이는 방향으로 $\theta$를 학습합니다.
다음은 논문에서 제시된 알고리즘입니다.
마치며
다음 글에서는 실제 구현체를 통해 WGAN이 어떻게 coding되는지 알아보도록 하겠습니다.
참고문헌
- https://www.cph-ai-lab.com/wasserstein-gan-wgan
- https://vincentherrmann.github.io/blog/wasserstein/
- https://www.alexirpan.com/2017/02/22/wasserstein-gan.html